Random sticks made to walk under Arduino control

What if you were to neglect a robot’s mechanical design entirely and instead construct it out of unusual materials like random sticks? Researchers from the University of Tokyo and Preferred Networks have done just that. To accomplish this feat, the engineers first scanned and weighed the branches, then used deep reinforcement learning to teach the new contraption to walk.
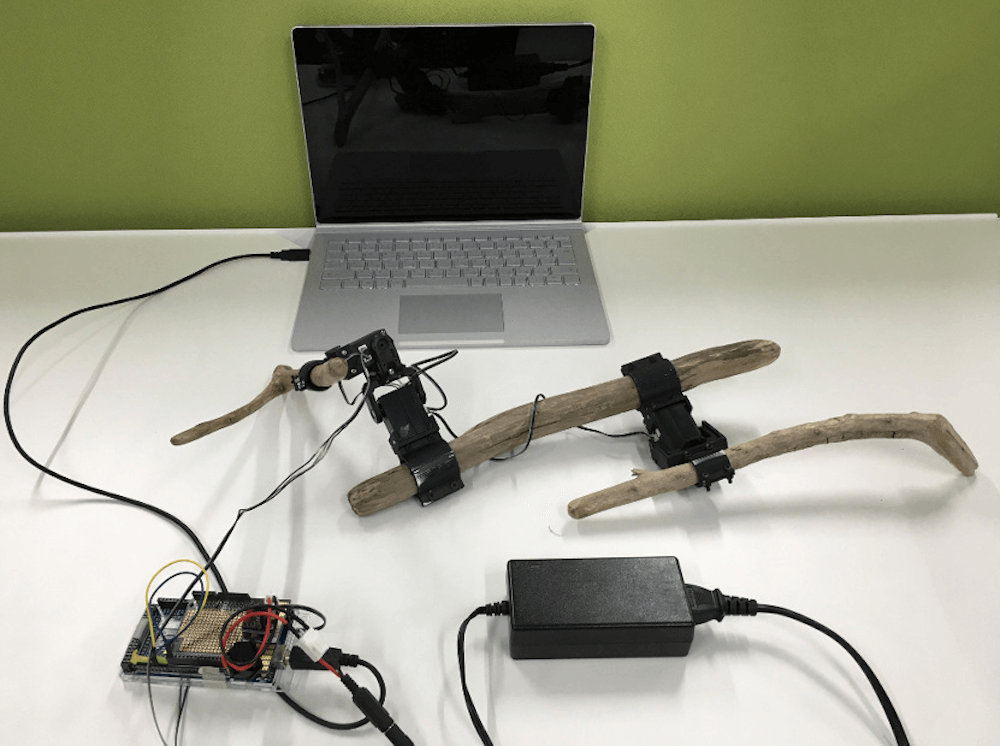
The branch-bots were then constructed in the real world using generic servos, and controlled via an Arduino Mega tether setup with a motor driver and a separate power supply.
You can see one of these bots moving around in the video below, though this configuration ironically seems to have more trouble when dropped off at its native forest habitat. Be sure to read more about this research in IEEE Spectrum‘s article here.
This project aims at creating bricolages of robots out of tree branches found at hand. Through the process in which natural objects learn how to walk by themselves, the artwork portrays the perspectives of objects. Unlike the top-down process where functions of mechanical systems are explicitly defined by designers, this project puts an emphasis on the emergence of functions, which is a bottom-up process where found objects seek for the function as a whole.
Images: Azumi Maekawa/University of Tokyo