Build your own Arduino balancing robot
If you’re familiar with the Segway or other vehicles that balance in what is known as an “inverted pendulum” configuration, you may think that while interesting, creating something similar would be too complicated or out of your budget. Though perhaps still not simple, Joop Brokking takes you through his design for this type of bot in the video seen here, making it accessible if you’d like to build your own.
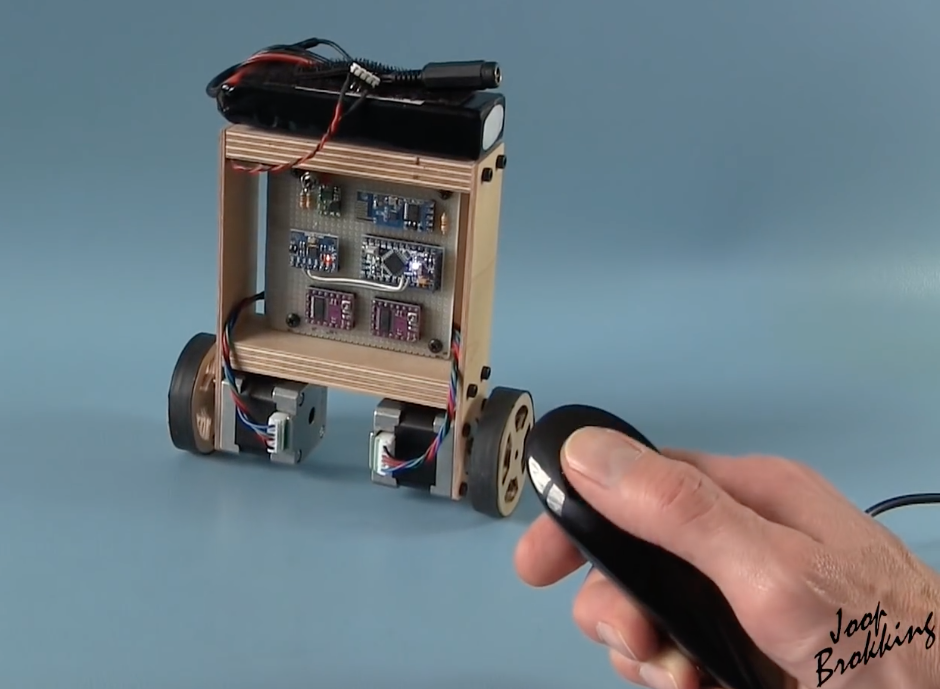
The robot, which will cost about $80 in parts, uses two stepper motors for greater movement precision than could be had with normal DC models, and employs an Arduino Pro Mini, along with an MPU-6050 accelerometer/gyroscope for control. It can be driven around by a Wii U-style nunchuck, which transmits to the robot via an Arduino Uno and wireless transceiver module.
You can find more info and product links for this project on Brokking.net.
May 28th, 2017 at 01:01:33
The link to your blog is broken. Please repost with a valid URL for this project. I’d really like to build it! Thanks
June 15th, 2017 at 22:47:24
A
beautiful
What a beautiful project and great detailed explanation. How much time did you spend on design and building?
Ivan
April 6th, 2018 at 00:16:46
Joop,
Any reason you couldn’t substitute Nano’s for the UNO and ProMini?
What do you use to power the Transmitter/controller side?
Fun project, great code and description,
Many thanks