Creating a continuum tentacle-like robot with Arduino
Continuum robots — which look like a tentacle or perhaps an elephant’s trunk — use a series of linkage sections and internal tendons to move both horizontally and vertically. While they may seem quite exotic, in the video below element14 Presents’ DJ Harrigan breaks down how he built one with an Arduino Mega and a fairly simple list of parts.
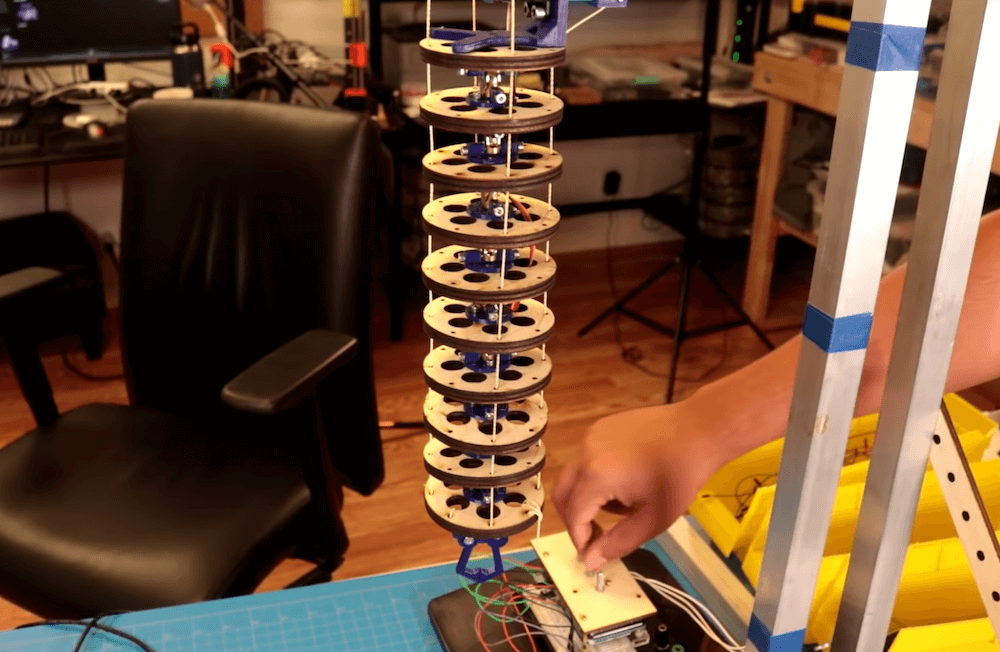
The robotic mechanism hangs down from a support structure, with universal joints allowing each section to bend, but not twist, with respect to the next one. These 10 sections are pulled in different directions using two servos and Kevlar cord, with user interface provided by two potentiometers. A third pot actuates another motor attached to the tentacle, acting as a gripper for tools, or whatever else Harrigan needs at the time!