Building an Arduino-based bipedal bot
— June 21st, 2020
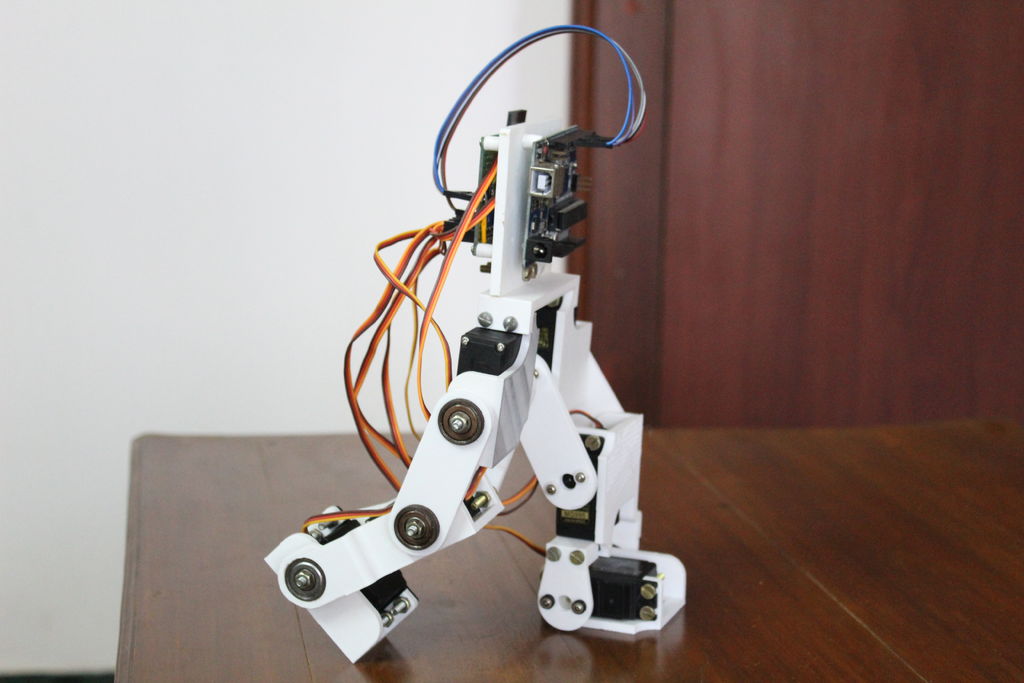
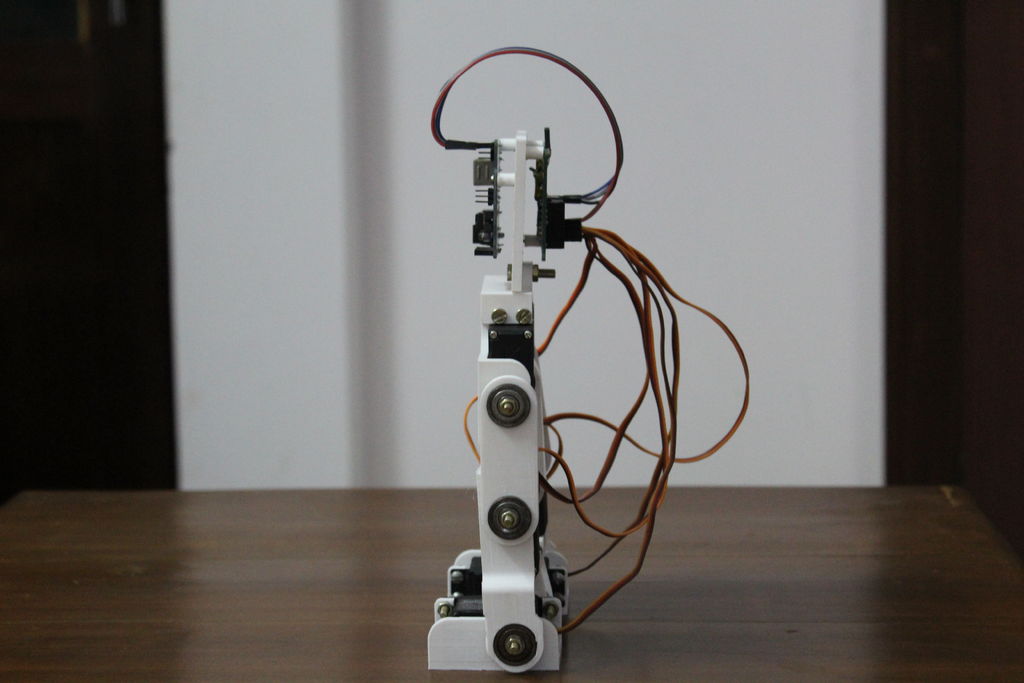
If you’d like to build a walking biped robot, this 3D-printed design by Technovation looks like a fantastic place to start. Each leg features three servos that actuate it at the hip, knee, and ankle for a total of six degrees of freedom.
Control is handled by an Arduino Uno board that rides on top of the legs, along with a perfboard to connect to the servos directly.
Movements are calculated via inverse kinematics, meaning one simply has to input the x and z positions, and the Arduino calculates the proper servo angles. The bot is even able to take steps between two and 10 centimeters without falling over.
Boards:Uno