This robot looks like a ball and transforms itself into a quadruped to move
— May 25th, 2020
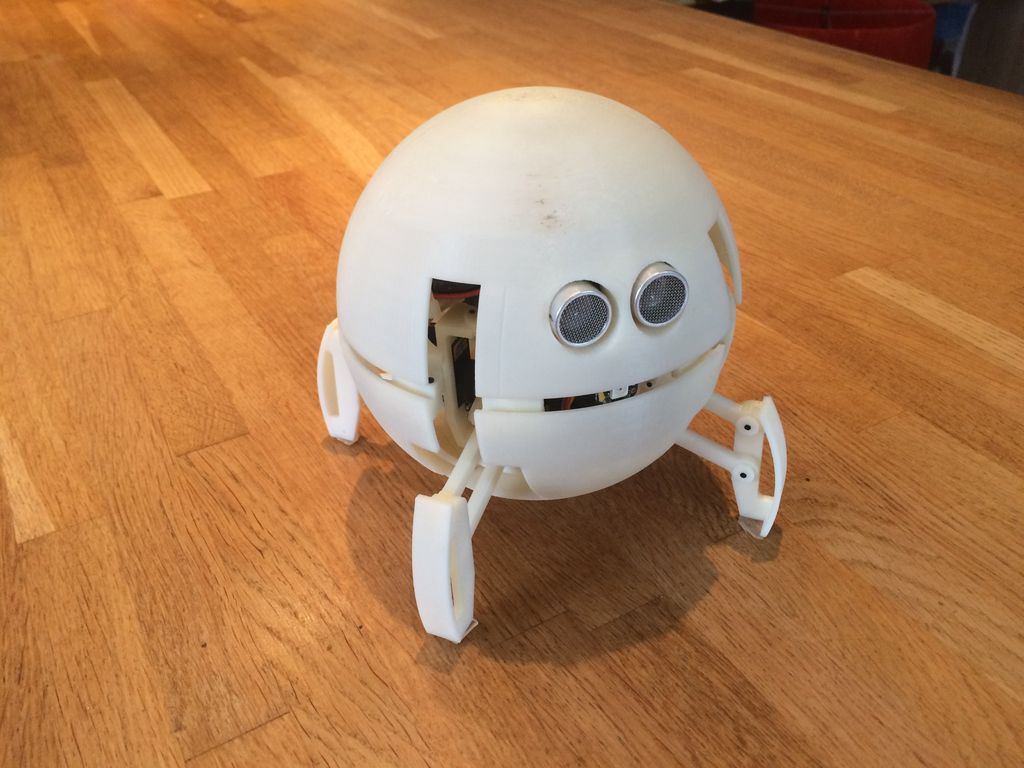
Gregory Leveque has created an adorable 3D-printed robot that not only walks on four legs, but folds up into a ball when not in use.
To accomplish this, the round quadruped utilizes one servo to deploy each leg via a parallelogram linkage system and another to move it forwards and backwards. A clever single-servo assembly is also implemented on the bottom to fill gaps left by the legs.
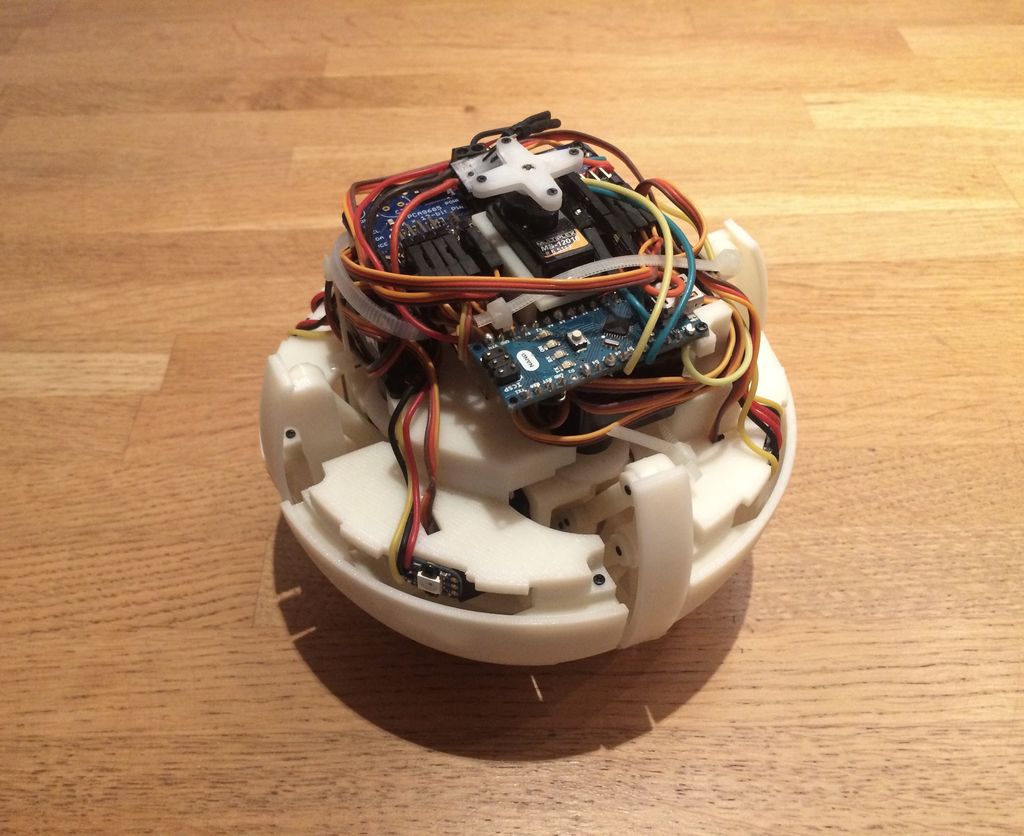
The device is controlled by an Arduino Nano, along with a 16-channel servo driver board. Obstacle avoidance is handled via an ultrasonic sensor, which sticks out of the top half of the sphere and rotates side to side using yet another servo.
It’s an impressive mechanical build, especially considering its diminutive size of 130mm (5.12in) in diameter.