This self-balancing mech is piloted by an insect
You’ve seen self-balancing robots, where a pair of wheels suspend a mass above them in what’s known as an inverted pendulum configuration. As neat as they are, the “Augmented Arthropod” by Grzegorz Lochnicki and Nicolas Kubail Kalousdian puts a new spin on things.
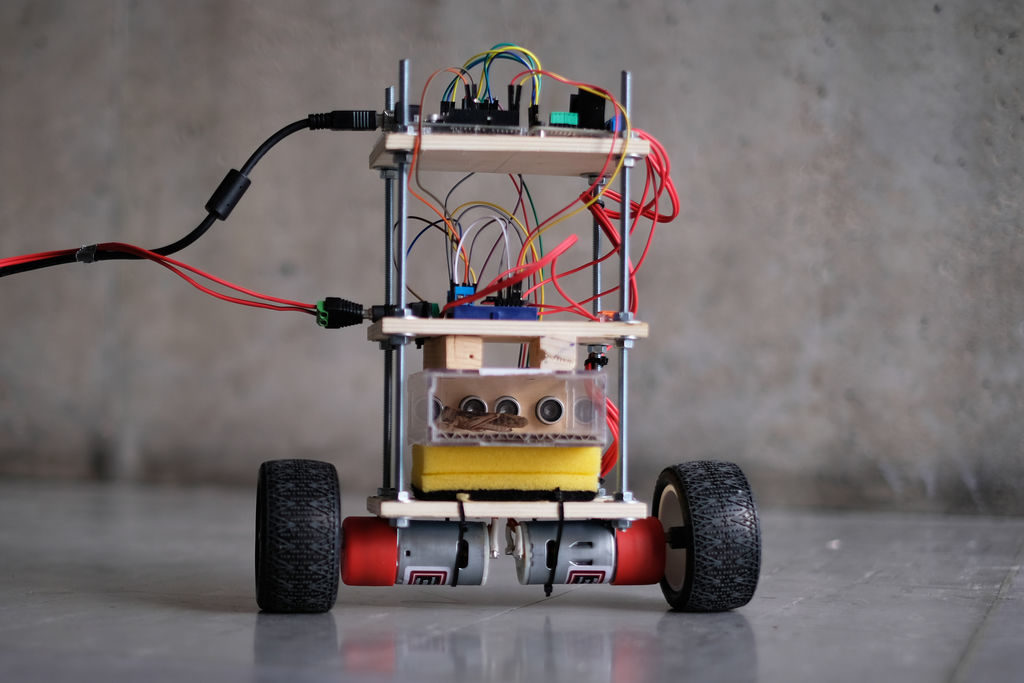
The structure for the build consists of three platforms separated on threaded rod and a couple of rather standard DC gear motors. Electronics include an Arduino Uno, a BNO055 IMU, and an L298N motor driver.
What makes things a bit interesting, though, is that the bot is actually piloted by the movements of an insect placed inside a plastic case using two HC-SR04 ultrasonic sensors.
Perhaps the most valuable part of the project write-up is the discussion about how it balances via PID, or proportional, integral, and derivative control.