Building a quadcopter running on Arduino Yún

Comelicottero is a quadcopter based on Arduino Yún created during the Master in Computer Science at the Universita’ degli Studi of Milan (Italy) by Simone Castellani, Giovanni Intorre and Andrea Toscano:
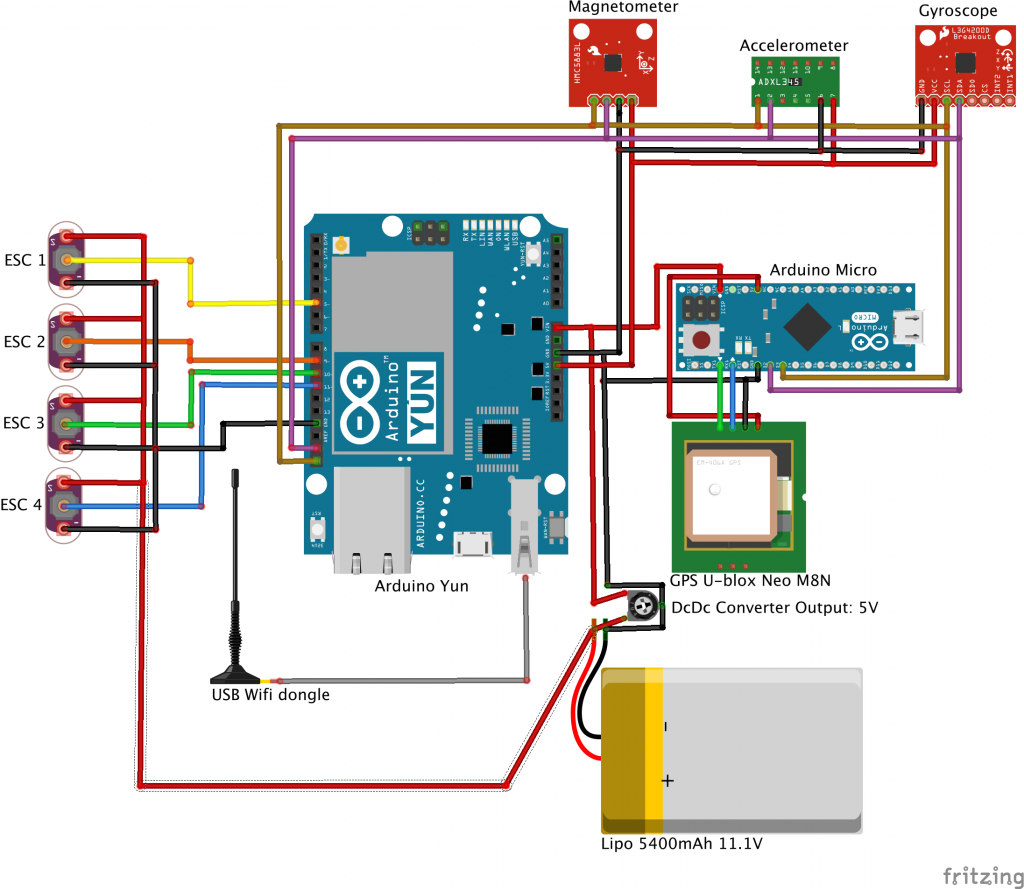
The idea was to build a drone able to be controlled through WiFi from any PC, tablet or smartphone . Comelicottero is equipped with an accelerometer and a gyroscope for the stability obtained by a PID-based control system. Since Servo library is too slow for the quadcopter dynamics, an hardware PWM was implemented to obtain a 400Hz PWM signal.
The communication between the ground station on a PC and the quadcopter relies on WiFi and, in order to get better results, Bridge library was replaced with an efficient python script on OpenWRT-Yun. On top of that all the code was written to maximise Arduino Yún capabilities. The Navigation System has been designed, simulated on PC, implemented and tested. The autonomous navigation is going through an additional testing due to magnetometer interferences with motors’ magnetic field.
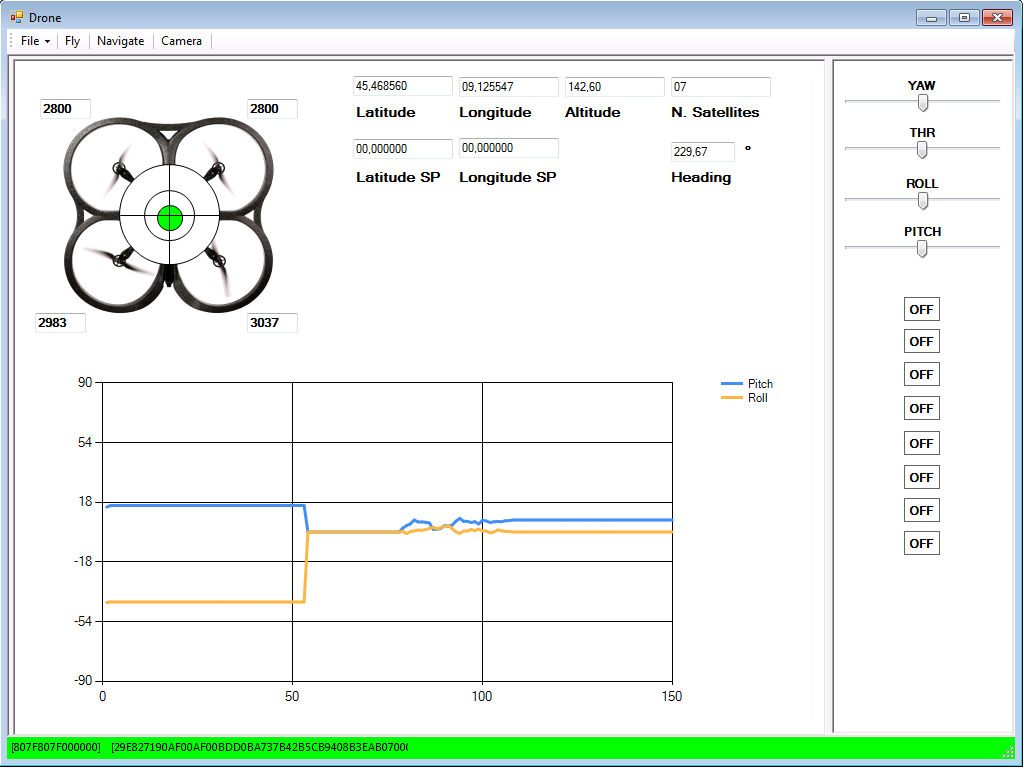
The user can control and monitor data coming from the drone using a gamepad attached to a laptop with a custom software installed.
The sketch and all the documentation will be soon available on GitHub and released with GNU license. In the meanwhile follow their Youtube Channel for updates.