Prototyping a rideable peristaltic motion robot
Robots with wheels are commonplace and even legged robots have lost some of that allure that comes from new technology. But what else is there? Well, if we look at nature we can see all kinds of interesting ways that critters manage to move around. Worms, for instance, turn wriggling into forward motion, with inchworms relying on peristalsis — the same mechanism your esophagus utilizes to move food to your stomach. James Bruton wants to build a peristaltic motion robot big enough to ride and constructed this prototype to test his ideas.
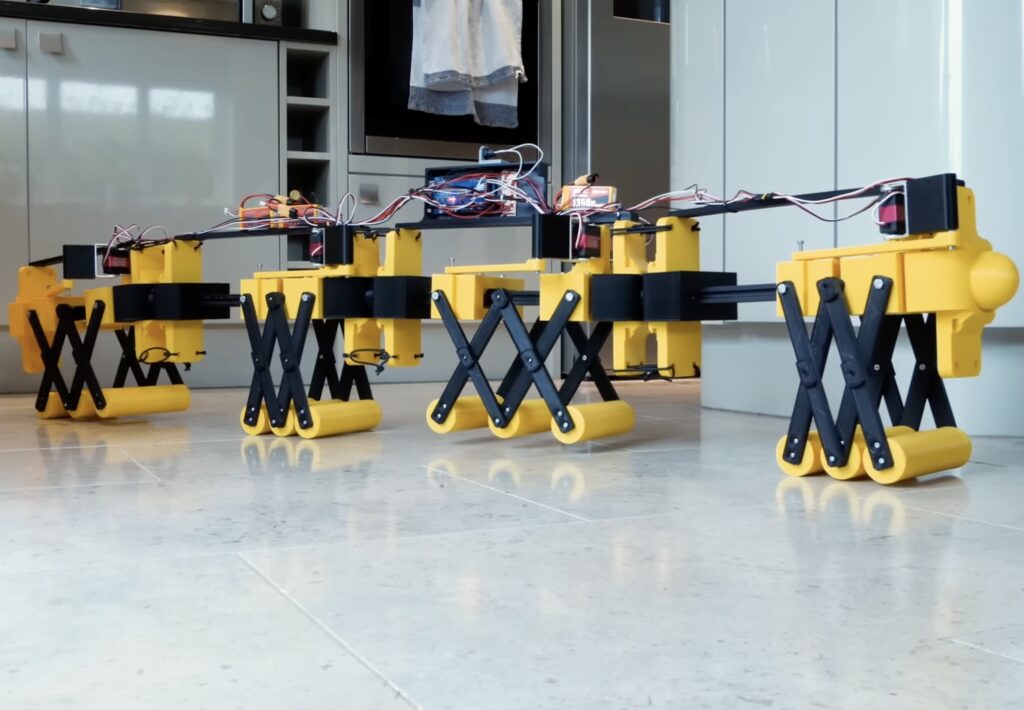
Peristalsis is well understood as it relates to some applications, like pumps. But this robot is a unique challenge because of the scale and because it is made of rigid bodies. All of the mechanical parts were 3D-printed and an Arduino Mega 2560 board controls the movement by actuating servo motors. For now, the Arduino only has to coordinate the movement by activating the servos in sequence. That’s because this prototype only moves forward and backward. But the full-scale rideable version would be more complex to allow for turns.
The secret to this robot’s movement is all in the linkages that connect the roller “feet” to the body. They resemble scissor lift mechanisms, but the tops mount to carriages that can slide forward and backward independently. The servo motors handle the actuation, so the Arduino can control the extension of the linkages and the position of the feet along the longitudinal axis. The robot has four segments and two of them make contact with the ground at any given time, while the opposite two lift up and move forward to repeat the cycle.This isn’t very efficient, but it does work. And, importantly, it has the potential to handle a lot of weight. That will be very useful if Bruton does scale the robot up to ride on