Robo-fish filters microplastics like a whale with krill
The world’s collective waste plastics don’t always stay in landfills. They often break down into microplastics that fill our oceans, then end up in our air, water supply, and food. According to an Orb Media study, 83% of the tested water samples from metropolitan areas all over the globe contained plastic fibers. One way to reduce microplastics before they end up in our bodies is to collect them where they float in lakes and oceans. For the Natural Robotics Contest, student Eleanor Mackintosh designed this robo-fish that filters microplastics like a whale eating krill.
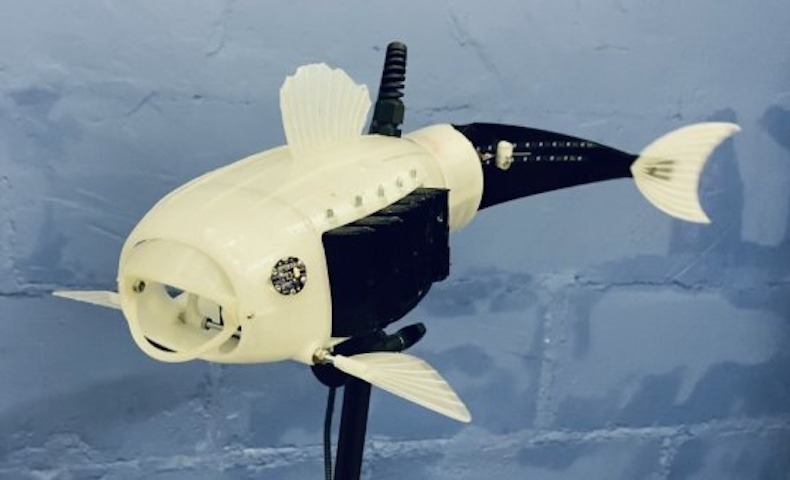
Mackintosh created the robo-fish concept and then the Natural Robotics Contest team turned it into a real robot. This robot, called “Gillbert” (we see you, Eleanor) is now an open source project and anyone can build it for themselves using the 3D-printable files published on GrabCAD. Gillbert contains mesh filters that collect plastic particles as water flows through its mouth and out of its gills. It swims through the water like a real fish by swinging its tail for propulsion and using its fins to steer.

An Arduino Nano 33 IoT board controls Gillbert’s motors and monitors the sensors, which include a LSM6DS3 IMU (inertial measurement unit), a turbidity sensor, and a light/color sensor. The Arduino receives commands through WiFi via a tethered receiver that floats on the surface. The operator pilots Gillbert using a Microsoft Xbox One controller and power comes from a 5000mAh USB battery bank.
The Natural Robotics Contest team tested Gillbert in a lake in Guildford, England with good results. While the robo-fish lacks the instruments to analyze microplastics, it can collect them and bring them back to researchers for study. On its own, Gillbert (or even a fleet of Gillberts) can’t collect enough microplastic to make a real-world difference. But the research that it enables could be very beneficial.