This robot can dynamically change its wheel diameter to suit the terrain

A vehicle’s wheel diameter has a dramatic effect on several aspects of performance. The most obvious is gearing, with larger wheels increasing the ultimate gear ratio — though transmission and transfer case gearing can counteract that. But wheel size also affects mobility over terrain, which is why Gourav Moger and Huseyin Atakan Varol’s prototype mobile robot, called Improbability Roller, has the ability to dynamically alter its wheel diameter.
If all else were equal (including final gear ratio), smaller wheels would be better, because they result in less unsprung mass. But that would only be true in a hypothetical world on perfectly flat surfaces. As the terrain becomes more irregular, larger wheels become more practical. Stairs are an extreme example and only a vehicle with very large wheels can climb stairs.
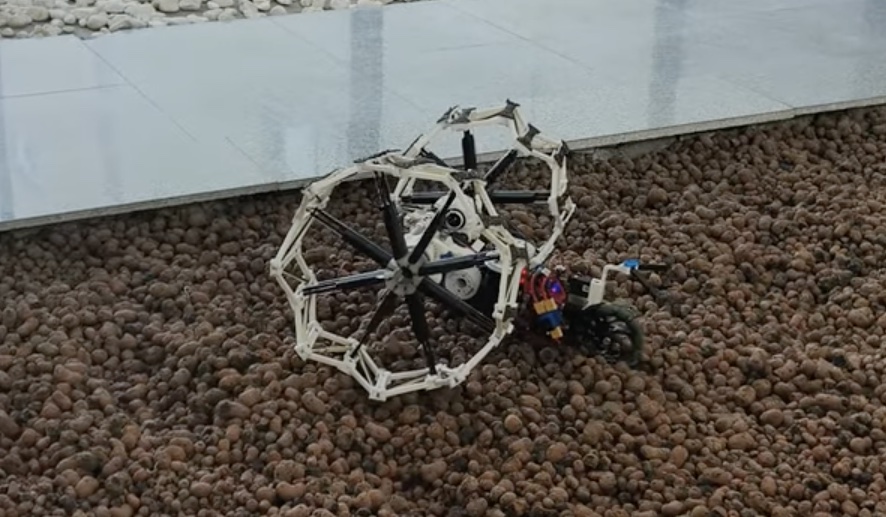
Most vehicles sacrifice either efficiency or capability through wheel size, but this robot doesn’t have to. Each of its wheels is a unique collapsing mechanism that can expand or shrink as necessary to alter the effective rolling diameter. Pulley rope actuators on each wheel, driven by Dynamixel geared motors by an Arduino Mega 2560 board through a Dynamixel shield, perform that change. A single drive motor spins the wheels through a rigid gear set mounted on the axles, and a third omni wheel provides stability.
This unique arrangement has additional benefits beyond terrain accommodation. The robot can, for instance, shrink its wheels in order to fit through tight spaces. It can also increase the size of one wheel, relative to the other, to turn without a dedicated steering rack or differential drive system.