Robot collects ping pong balls after matches
If you frequent driving ranges, you’ve probably seen a machine (often attached to the front of an armored golf cart) designed to pick up golf balls. Because a driving range can easily fill up with thousands of golf balls an hour, such machines are necessary. After noticing that nobody wanted to pick up the ping pong balls after matches, Maxime Monsieur and his team (Oumaima Achkif, Reda El Marsse, and Amir Farbod) built this robot that collects ping pong balls using a mechanism similar to those used for golf balls.
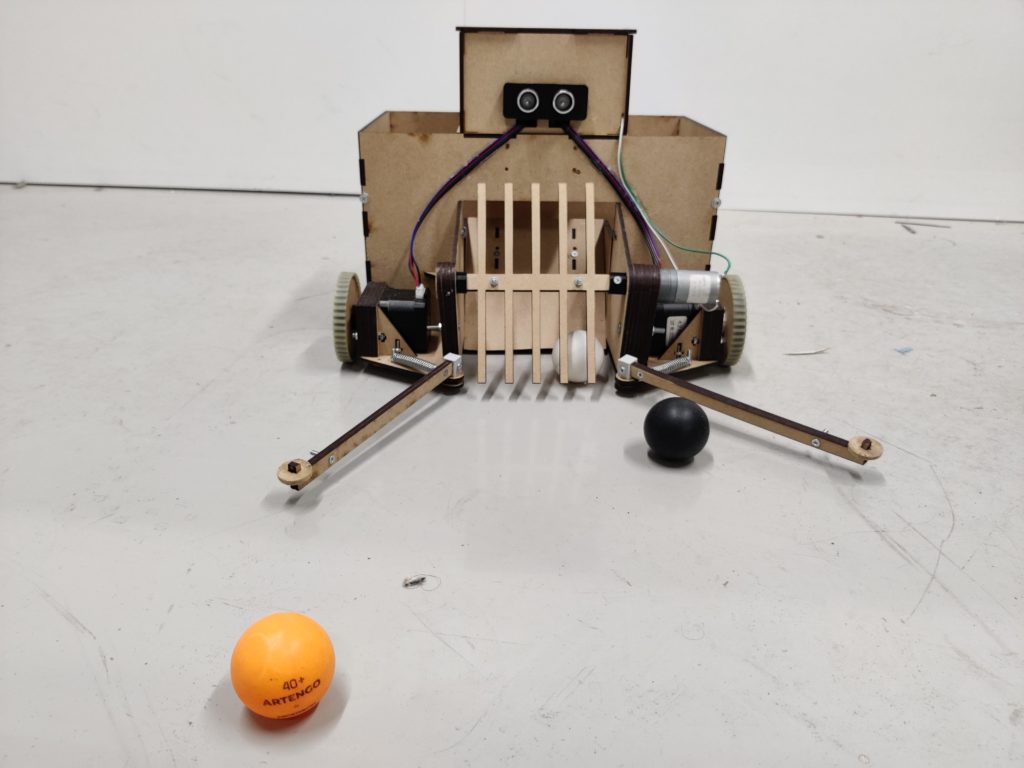
Like a golf ball collecting machine, this robot picks up golf balls using a spinning mechanism that resembles something you’d see on an agricultural harvester. Any ping pong balls in front of the robot get pushed towards that mechanism by a pair of spring-loaded arms. The rotating mechanism then pushes the ping pong balls up a ramp and into a bin. The robot navigates through the room like an old robot vacuum: by driving forward until it meets a wall, then turning in a random direction.
The team constructed the robot’s frame and body using a combination of laser-cut MDF and 3D-printed plastic parts. It has two stepper motors that spin the two drive wheels, and a DC motor that spins the collection mechanism. An ultrasonic sensor detects walls and other obstacles. An Arduino Uno board controls the two stepper motors via A4988 driver boards and turns the DC motor on via a relay module.
In tests, this robot seems to work quite well, even though its navigation is inefficient. No word on if nearby players attempt to pelt the robot with ping pong balls as it works.