Building an experimental wave drive tank
There are many ways to make a thing ambulatory beyond simply slapping on some wheels. James Bruton often experiments with these unique drive mechanisms, whether they are practical or not. In his newest video, he built what he calls a “wave drive” to propel a tank-like robot. This experimental wave drive tank features a 3D-printed body and remote Arduino-based control.
This drive mechanism works using motion similar to someone doing the worm dance move, which is very much like how flatworms swim through water in nature. For a more technical visualization, imagine a spinning helix projected onto a 2D plane. The result looks like a sine wave, hence the name. The bottom of the wave makes contact with the ground and friction provides grip, letting the mechanism roll forward. That helix visualization also mirrors the physical implementation here, as a screw-shaped drive shaft guides tracks as it spins.

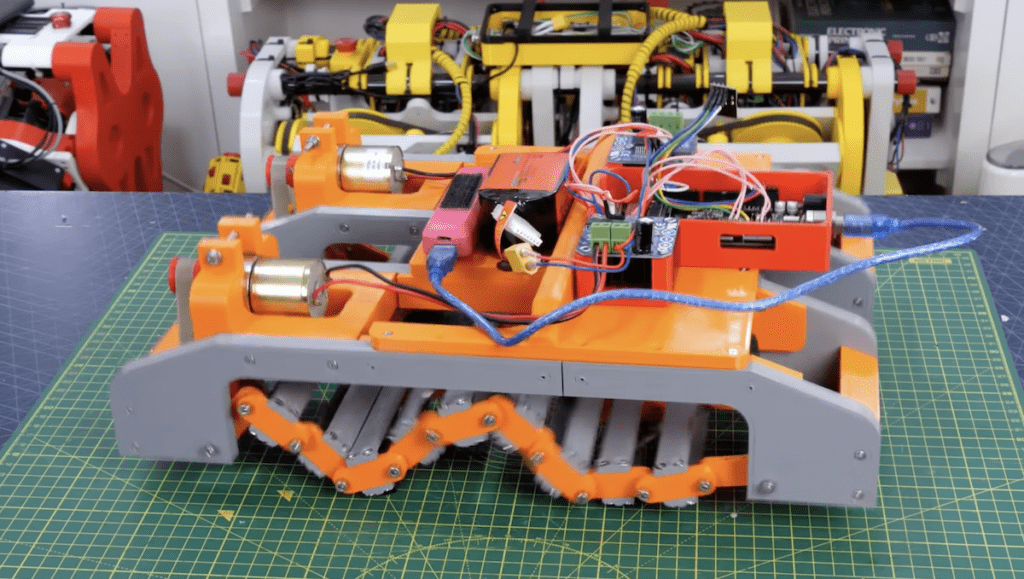
Bruton 3D-printed almost every physical part of this robot, with the major exception being the helical metal rods. Those rods spin on bearings and an Arduino Mega 2560 controls their 12V DC motors through driver boards. As with more conventional tank tracks, forward or reverse movement occur when both motors spin in the same direction. To rotate the robot, the motors just need to spin in opposite directions. The Arduino can vector motor direction and speed according to throttle and steering inputs from Bruton’s custom remote control.
As Bruton demonstrates in the video, this wave drive works – but it doesn’t work very well. It is slow, inefficient, difficult to control, and has a hard time overcoming obstacles. That makes sense, since this movement is better suited to ambulation in viscous fluid. Even so, it is great to see Bruton testing the real world practicality of another unconventional drive mechanism.