This walking machine can mosey in any direction
Wheeled vehicles are so common because they’re efficient. If a vehicle will drive on a relatively smooth and flat surface, wheels are the most efficient option. But on rough terrain, wheels don’t always cut it. For such terrain, tank tracks and more exotic options often perform better than wheels. Walking machines take that to the extreme, climbing over rough ground in the same way as animals do. But traditional walking machines struggle to turn on the spot without using many motors. To overcome that limitation, James Bruton took inspiration from omni wheels to build a robot that can move in any direction.
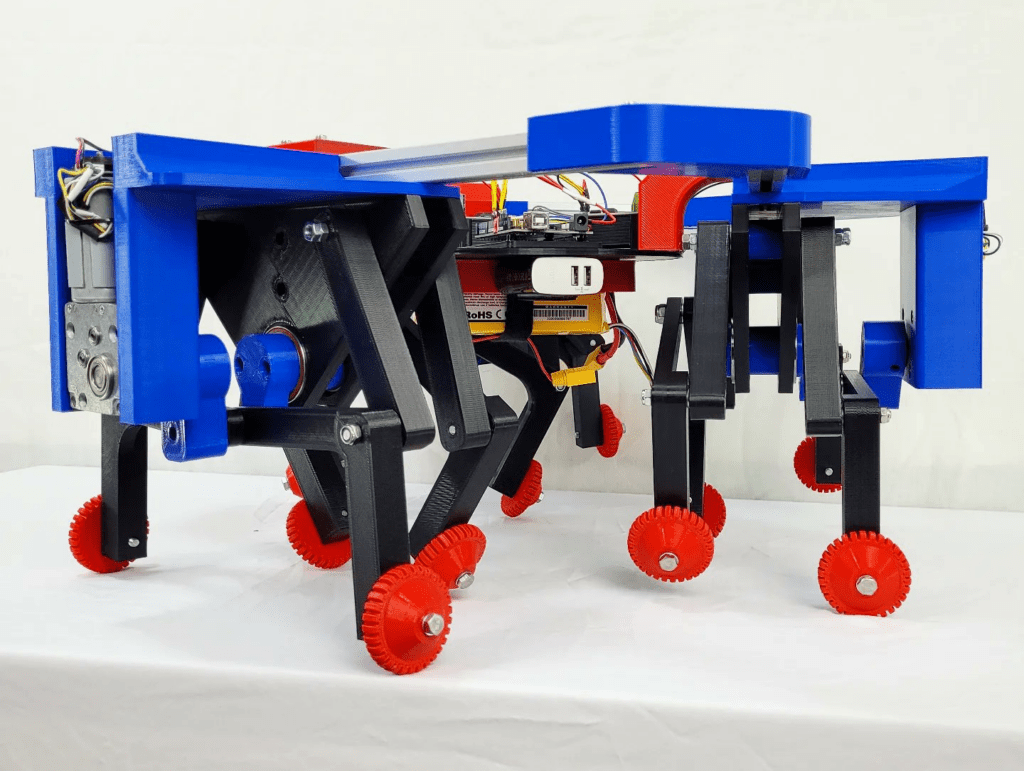
Bruton uses omni wheels in many of his projects. Omni wheels have rollers around their circumference, which lets them roll passively in one direction and actively in another. A vehicle equipped with four omni wheels can move in any direction by spinning the individual wheels in opposing directions. This walking robot utilizes a similar concept. In each mechanism’s active direction, it walks forward. But the feet have freely rotating wheels, which lets each mechanism roll passively to either side. The robot has three of these walking mechanisms in a triangular pattern, so it can move in any direction by controlling which mechanisms are active and which are passive at any given time.
Each walking mechanism has a single drive motor (a DC motor with a gearbox) that can spin forwards or backwards. Bruton controls the speed and direction of those motors with an Arduino Mega 2560 board via BTS7960 driver modules. The Arduino receives commands from Bruton’s custom remote control through a radio transceiver module. Almost all the robot’s mechanical parts were 3D-printed, with the exception of some aluminum extrusion and fasteners.
On smooth carpet, the robot walks very well. It can also clear small obstacles, though it won’t be climbing any mountains. But it proved the concept and Bruton is considering building a huge version of this robot that he will be able to ride on.