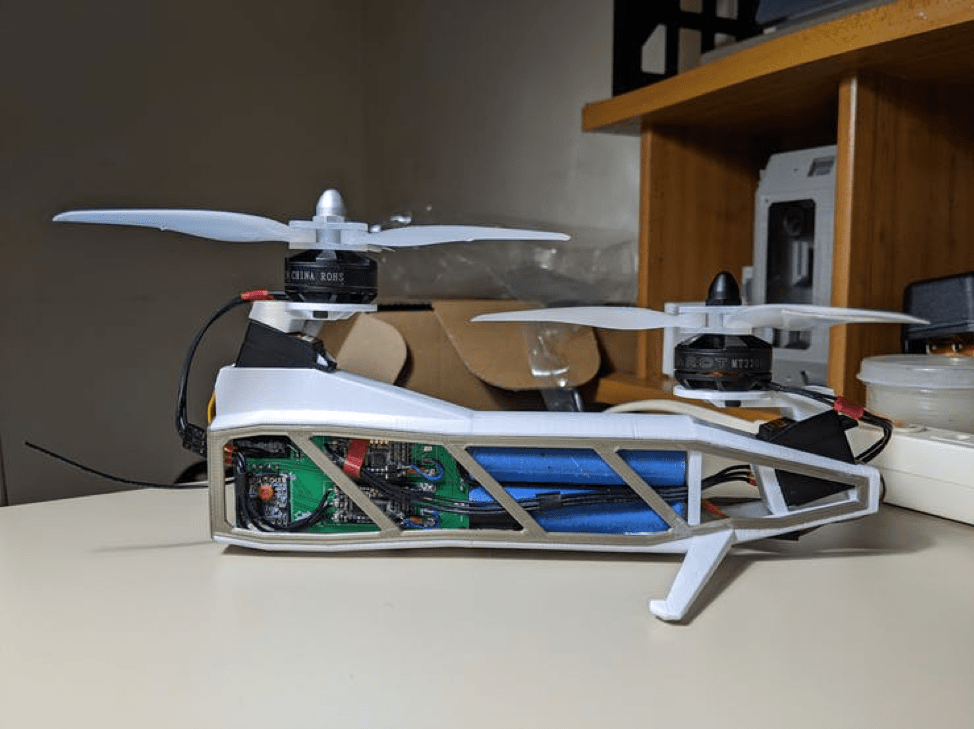
This Nano 33 IoT-controlled bicopter uses a pair of rotors to achieve stable flight
The classic helicopter design that everyone is familiar with features a large central rotor that produces lift and a much smaller one towards the back, which prevents the helicopter from spiraling out of control. However, Redditor CCCanyon decided to take inspiration from Boeing’s CH-47 Chinook that leverages a pair of equally sized and offset rotors that work together to both move the helicopter while remaining steady.
The most visible aspect of the project is the unique 3D-printed frame that houses the electronics, batteries, and motors required for flight. The controller is a single Arduino Nano 33 IoT, which constantly takes measurements from its onboard LSM6DS3 six-axis IMU and sends that data through a PID algorithm to create small adjustments. The pilot is able to control the aircraft by manipulating a single-stick controller that sends commands from its LoRa SX1276 transceiver to the bicopter’s. Finally, the two rotors are spun by brushless DC motors that were set atop servo motors, which tilt them in order to modify the heading.
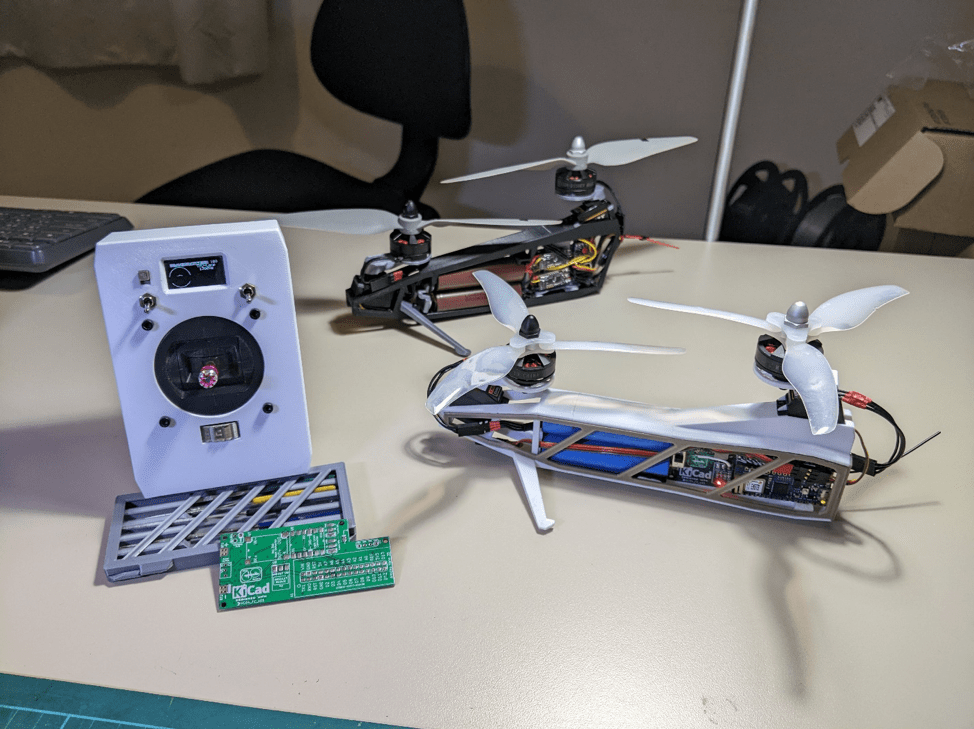
This project, along with the from-scratch code required to make it work, is very impressive, as can be seen in the demo video below. CCCanyon is also currently working on a second version of the bicopter, and it will be exciting to see which improvements have been made.