Researchers propose a coil spring-based soft actuator using two flexible ultrasonic motors
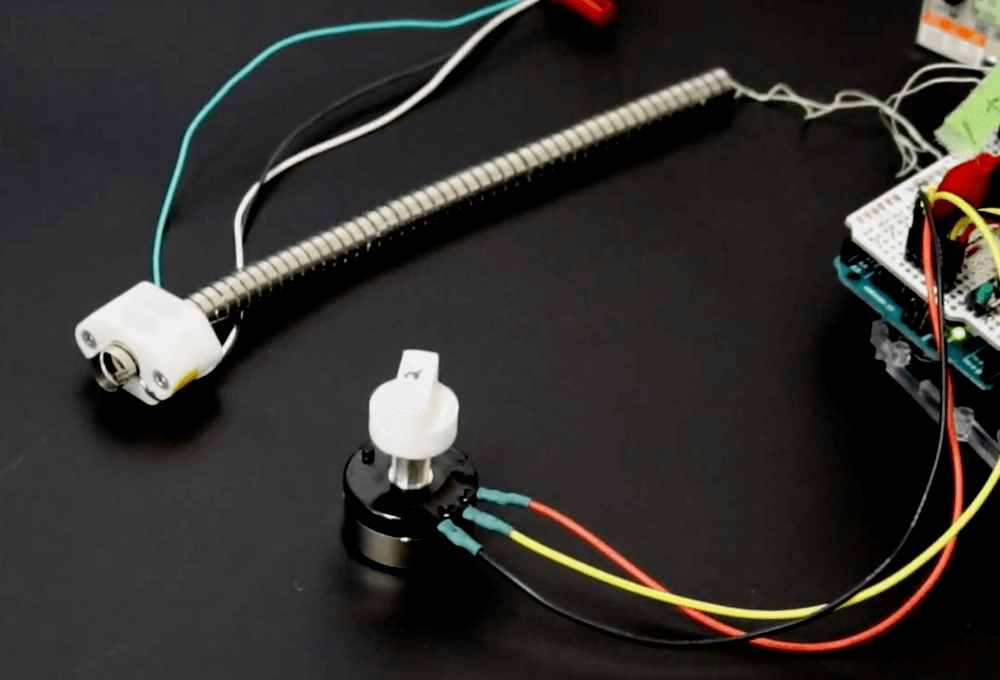
Researchers Yunosuke Sato, Ayato Kanada, and Tomoaki Mashimo have developed a novel continuum (snake) robot actuator that can flex and sense its position with twin coil spring assemblies. Each uses a couple of piezoelectric actuators to induce ultrasonic vibrations on a stator block, pushing the spring inside forwards or backwards. When combined, the springs can advance together, or twist left and right when lengths are varied.
Extension sensing is accomplished via voltage feedback through the springs, allowing its Arduino Uno-based experimental setup to determine each position with no extra equipment. With this data, the curvature angle of the two springs together can be calculated, and while the “snake” now works in two dimensions, perhaps such a system could be used with another spring for full 3D control!
For more information, the team’s research paper is available here.