Can Arduino help with tightrope walking?
Walking a tightrope does take skill and natural balance, but it is really a matter of inertia. This is why you see acrobats carrying long poles on the high wire — the weight and length of the pole creates inertia that gravity must overcome in order to topple the performer. But those poles are unwieldy. To find out if he could achieve the same thing in a more compact package, James Bruton built this strange Arduino-controlled balancing backpack.
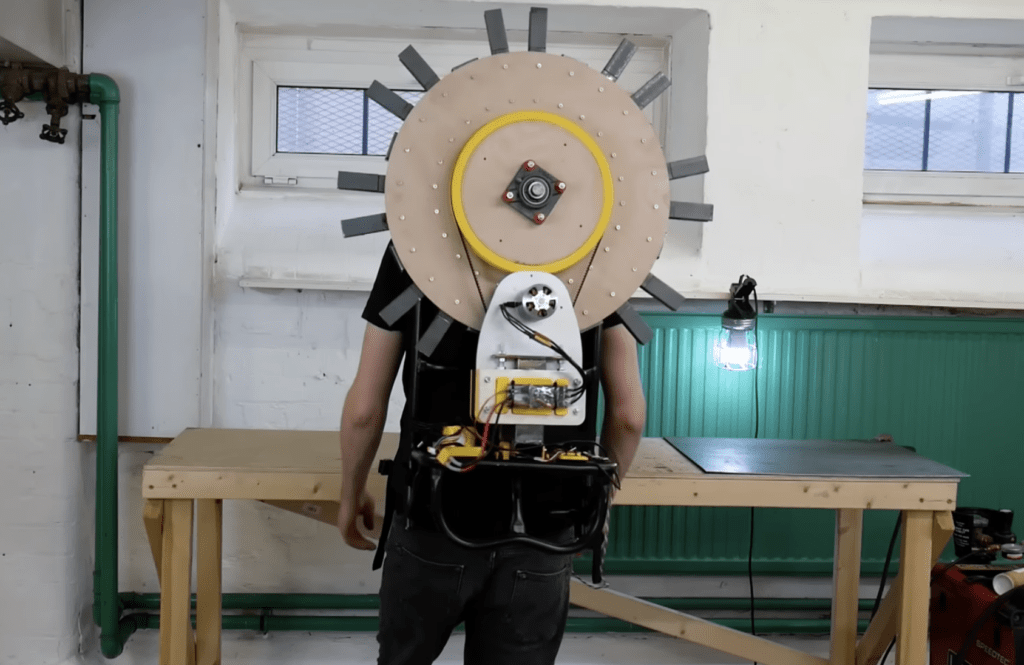
Bruton has something of a fascination with self-balancing robots. His experience in that arena carried over here, because the backpack works a lot like a self-balancing robot. A weighted reaction wheel spins either clockwise or counter-clockwise, which will create rotational inertia to compensate for roll (left or right tilt). But instead of keeping a robot upright, this inertial mechanism sits on a backpack that Bruton can wear to stay upright as he attempts to walk along a beam.

An Arduino-compatible Teensy LC measures the angle of the backpack using an MPU-6050 inertial measurement unit (IMU). The board also controls a large brushless DC motor, which spins the reaction wheel through a belt drive that gears down the mechanism. Power comes from a huge hobby LiPo battery pack. Bruton added a hand throttle as well, which lets him adjust the speed of the reaction wheel. Without that, the system would fight his own natural movement. With it, he can increase the throttle as necessary when he starts falling to one side or the other.
After some initial hiccups caused by the reaction wheel lacking the mass to help, Bruton was able to navigate the balance beam successfully.