This insane kinetic clock robot flips itself into position
Displaying the time these days is trivial — you could do it with any Arduino board and a simple four-digit seven-segment display. But as humans, we crave novelty and it isn’t uncommon to see a clock that is more art than a practical timekeeping device. That is true of AKUROBATTO, which is an insane kinetic clock robot that flips itself into position.
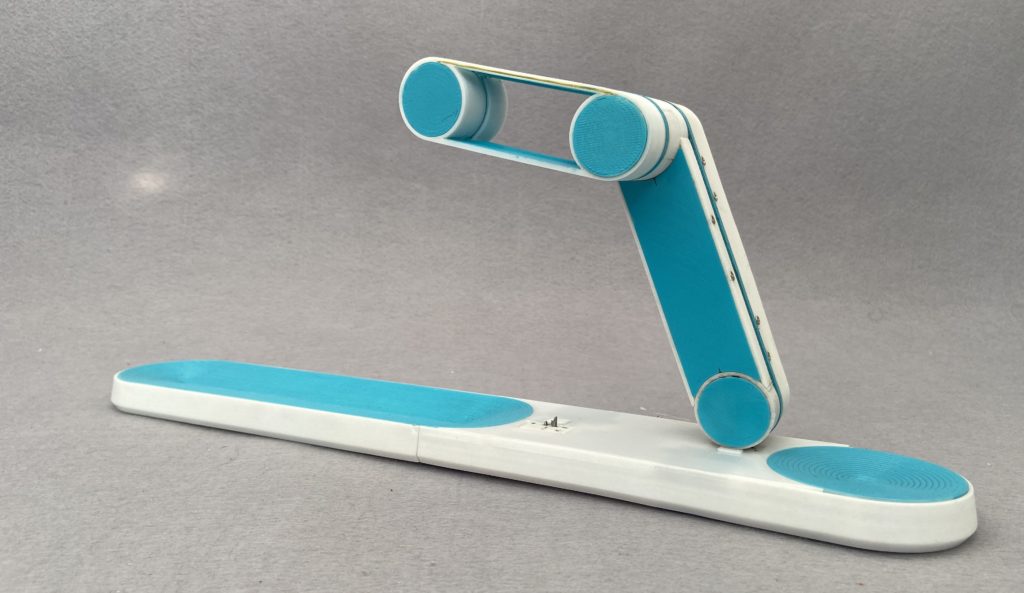
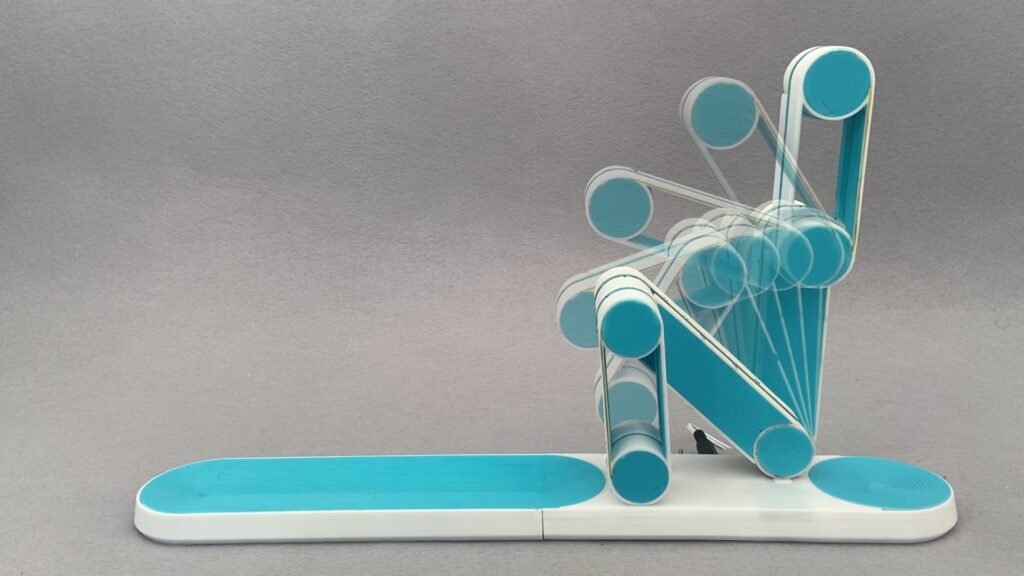
AKUROBATTO consists of a skateboard deck-shaped platform and a motorized robot. The robot acts like the hands of an analog clock, with two arms joined by a pivot joint. One can tell the time by judging the relative angular positions of the two arms. That sounds straightforward, but it gets more interesting when you realize that the pivot point between the two arms is not hard-mounted. So to change the angle between the arms, the robot must lock itself into place on the platform and then flip around.
It achieves that movement using two geared stepper motors and two clever servo-driven locking mechanisms. The latter let the robot latch onto the platform in one of two locations. Two Arduino Mini boards control the movement and monitor the angle through an AS5600 rotary encoder sensor. The Arduinos communicate with each other using a pair of nRF24L01 radio transceivers.
But the mechanical design is what truly sets AKUROBATTO apart. Its structure is 3D-printed, but it utilizes an ingenious system of locking rings and GT2 timing belts to transfer torque for movement. It is difficult to even comprehend without seeing the movement for yourself, which is exactly as kinetic art should be.