Wireless Robotics Platform: Cheap R/C Vehicle + Arduino + XBee + Processing
— March 5th, 2010
Wow. I definetly have to check this step by step guide to build your own Processing-controlled car.
Toy Hacking is one of the best way to learn how to deal with little hardware. Very well detailed.
++
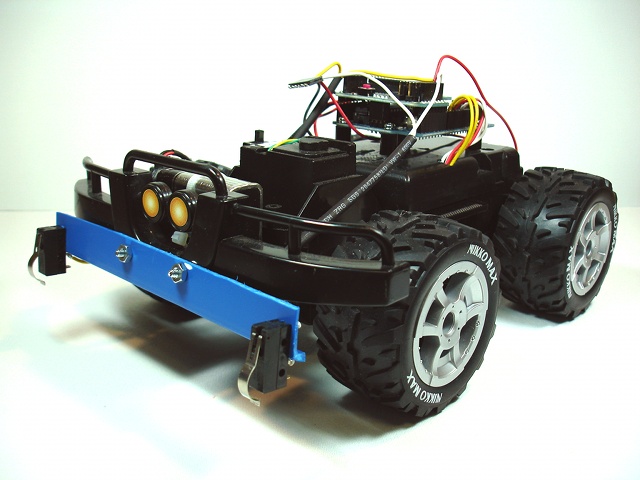
Some Features:
via [NootropicDesign]
Tag Technorati: arduino, Rc Cars, Xbee, Processing,All logic controlling the vehicle is performed in a Processing program running on remote computer. The Arduino program listens for commands from the remote computer. Bi-directional wireless communication over XBee radios with (theoretical) 1-mile range. I’ve accomplished 1/4 mile range with these radios. Sensor events are transmitted from the vehicle to the controlling computer. This vehicle has 3 microswitches – two on front bumper and one at the rear. Original circuitry of vehicle replaced with dual H-Bridge circuit to control drive motor and turn motor. Drive motor is controlled with variable speed. Power: Vehicle motors powered by 4 AA batteries. Arduino with XBee shield powered by 9V battery mounted at front of vehicle. Simple communications protocol: 2 byte commands from controller to vehicle, one byte sensor readings from vehicle to controller.
